{kind=link}
جدول المحتويات
يمثل هذا الاختراق، الذي تم بالتعاون مع نظام “أستروبى” التابع لناسا، أول استخدام فعلي للتحكم في الحركة المعتمد على التعلم الآلي في الفضاء، مما يثبت أن الروبوتات يمكنها التعلم من التجارب السابقة للتحرك بشكل أكثر أمانًا وكفاءة.
بالنسبة لرواد الفضاء الذين يعتمدون بالفعل على الروبوتات في المهام الروتينية، فإن هذا التطور يشير إلى مستقبل حيث تتولى الآلات المزيد من العمليات بشكل مستقل، خاصة في البيئات التي تعتبر خطرة أو معقدة جدًا بالنسبة للبشر.
لماذا تعتبر التنقلات في محطة الفضاء الدولية صعبة للغاية؟
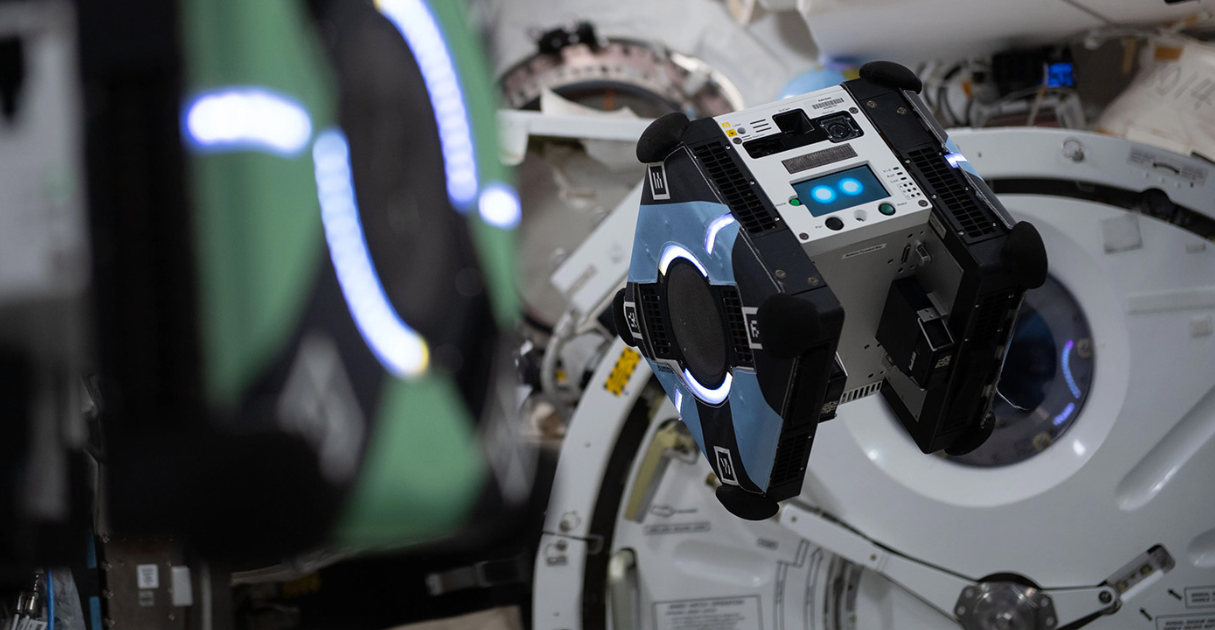
تُعرف المساحات الداخلية لمحطة الفضاء الدولية بأنها مزدحمة للغاية. حيث تملأ الجدران بأرفف التجارب، وأجهزة الكمبيوتر المحمولة، وحزم الأسلاك، والكاميرات، ووحدات التخزين. تخيل محاولة توجيه طائرة مسيرة عبر ممر ضيق مليء بالرفوف والأسلاك، ثم ضع تلك الطائرة في حالة انعدام الوزن. هذا هو التحدي الذي يواجهه نظام “أستروبى”.
تتطلب الخوارزميات التقليدية المستخدمة على الأرض حسابات معقدة، ولكن أجهزة الكمبيوتر المستخدمة في الفضاء أقل قوة بكثير. كما تواجه الروبوتات اضطرابات غير متوقعة، مثل تدفق الهواء من فتحات التهوية أو حركة الطاقم، مما يجعل التنقل الآمن أكثر تعقيدًا.
كيف جعل الذكاء الاصطناعي التنقل أسرع
لحل هذه المشكلة، قام فريق البحث بتدريب نموذج تعلم آلي على آلاف المسارات السابقة التي تم حلها داخل محطة الفضاء الدولية. وهذا سمح للنظام بتوليد “بداية دافئة”، وهي تخمين مستنير لمسار الروبوت قبل تشغيل خوارزمية تحسين كاملة.
تحتفظ هذه الطريقة الهجينة بجميع قيود السلامة الخاصة بناسا، بينما تسهم بشكل كبير في تسريع عملية التخطيط. في أصعب حالات التنقل، مثل الممرات الضيقة أو التسلسلات التي تتطلب دورانًا معقدًا، قدمت الطريقة المعتمدة على الذكاء الاصطناعي أداءً أسرع بنسبة 50-60%.
- بدون الذكاء الاصطناعي، قد يستغرق “أستروبى” وقتًا طويلاً لحساب كيفية التسلل بين تجربتين مثبتتين على جانبي ممر ضيق. ومع الذكاء الاصطناعي، يبدأ بفكرة تقريبية بناءً على مسارات سابقة مشابهة وينهي الحساب في نصف الوقت تقريبًا.
الاختبارات على الأرض وفي الفضاء
قبل الإقلاع إلى محطة الفضاء الدولية، تم اختبار النظام على طاولة هوائية تحاكي انعدام الوزن في مركز أبحاث ناسا في أيمس. وعند الوصول إلى الفضاء، ساعد رواد الفضاء، بما في ذلك سونيتا ويليامز، فقط في الإعداد. بينما كانت العمليات الفعلية تُدار عن بُعد من الأرض، مع تدفق الأوامر من ستانفورد إلى مركز جونسون للفضاء التابع لناسا وأخيرًا إلى محطة الفضاء الدولية. تم تنفيذ كل من مسارات الاختبار الـ 18 مرتين: مرة مع بداية باردة تقليدية ومرة أخرى مع بداية دافئة تعتمد على الذكاء الاصطناعي. كانت تحسينات السرعة متسقة وملحوظة بشكل خاص في المناطق المزدحمة من المحطة.
موافقة ناسا والتطبيقات المستقبلية
وصلت التكنولوجيا الآن إلى مستوى جاهزية التكنولوجيا 5، مما يعني أنها تم التحقق منها في بيئة تشغيلية حقيقية. وهذا يقلل بشكل كبير من المخاطر بالنسبة لمقترحات المهمات المستقبلية التي تعتمد على الروبوتات المستقلة.
مع النظر إلى المستقبل، يخطط الفريق لدمج نماذج ذكاء اصطناعي أكثر تقدمًا، مشابهة لتلك المستخدمة في السيارات ذاتية القيادة ونماذج اللغة الكبيرة، لتمكين الروبوتات من التفكير والتخطيط والاستكشاف باستقلالية أكبر بكثير.
في مهمات القمر والمريخ المستقبلية، حيث تجعل تأخيرات الاتصال التحكم عن بُعد غير عملي، ستكون هذه الاستقلالية ضرورية. قد تقوم الروبوتات قريبًا برسم خرائط الكهوف، واستكشاف مناطق الهبوط، أو مساعدة رواد الفضاء في موائل تبعد ملايين الأميال عن الأرض، وكل ذلك باستخدام أساسيات الذكاء الاصطناعي المثبتة اليوم على متن محطة الفضاء الدولية.
(عبر)
المصدر: الرابط الأصلي